Back
Back

-
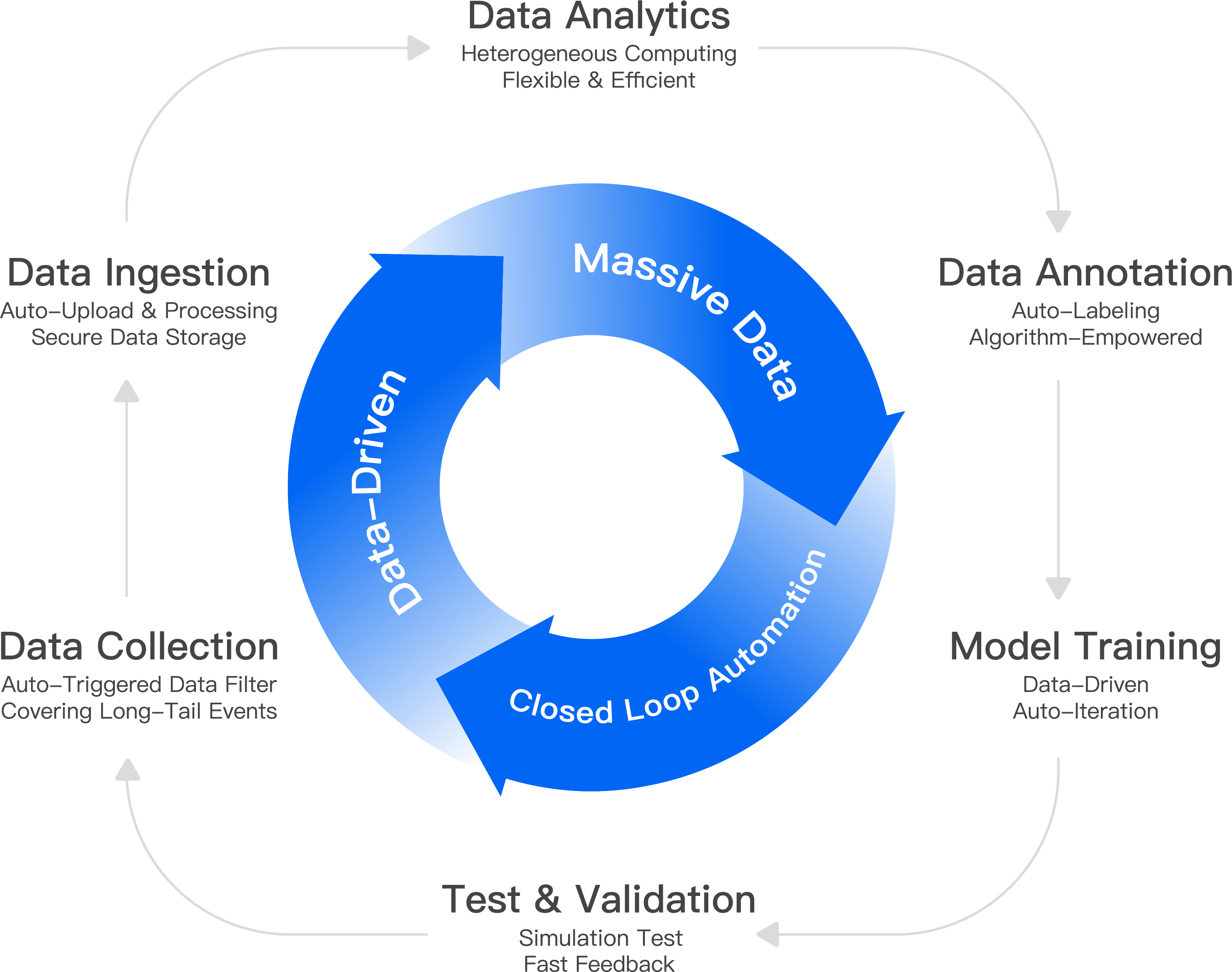
Data-DrivenEnd-to-end Big Model (EBM) based on realworld experience that outperforms rule-based algorithms.
-
Massive DataRobust model built on huge data from mass production cars capturing more diverse scenarios and corner cases.
-
Closed Loop AutomationHighly automated software toolchain to enable an efficient and lowcost feedback loop for constant product improvement.
Momenta R7 World Model
Momenta R7 World Model
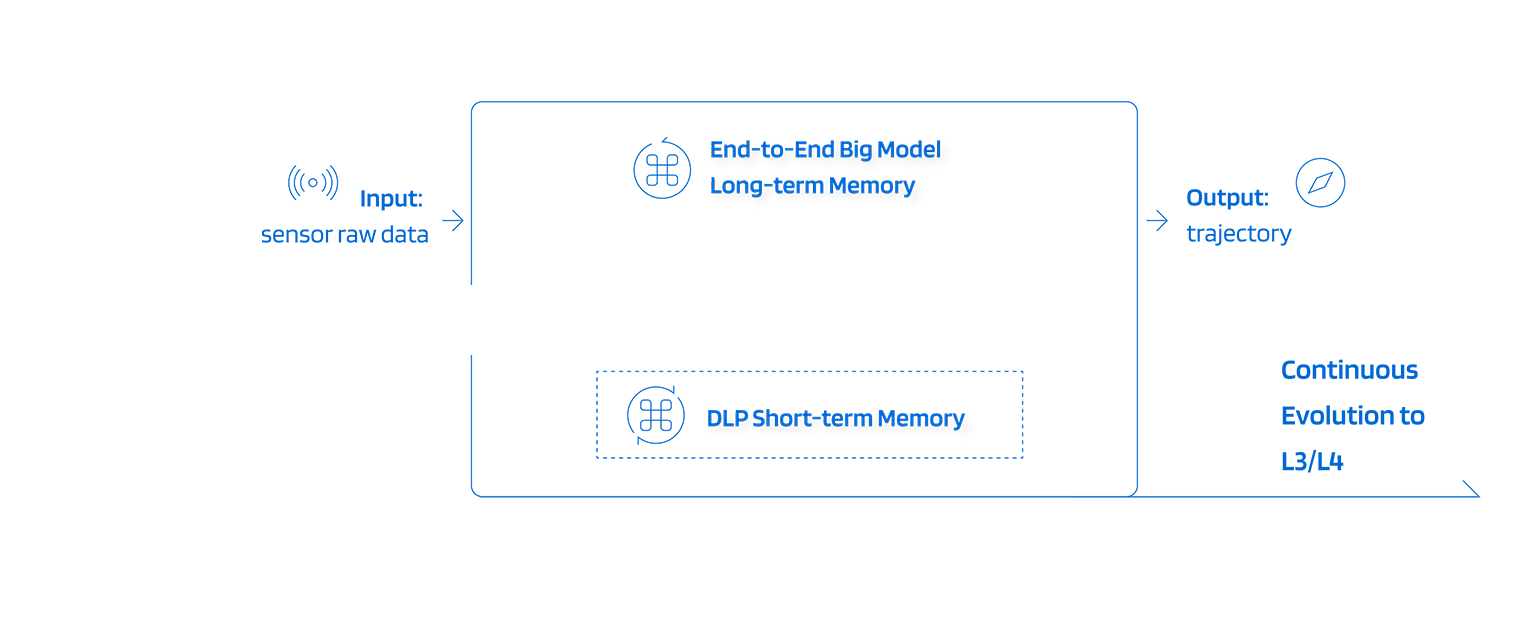
Understanding the physical world like humans, Momenta R7 World Model perceives object properties, causal motion, and potential interactions, enabling physically aware prediction and planning. It goes beyond language constraints, unlocking stronger negotiation, smarter lane selection, and agile maneuvering in complex spaces.
Understanding the physical world like humans, Momenta R7 World Model perceives object properties, causal motion, and potential interactions, enabling physically aware prediction and planning. It goes beyond language constraints, unlocking stronger negotiation, smarter lane selection, and agile maneuvering in complex spaces.



Efficient Narrow Road
Navigation
Navigation

Smart Lane Selection

Section on Navigating
Construction Zones
Construction Zones

Closed
Loop
Automation
CLA enables us to quickly and cost-efficiently process, filter and label massive amounts of data and deploy our algorithms against more applications and driving scenarios. This drives our algorithms to become smarter and more sophisticated, leading to efficient iteration and improved performance of our technology and solutions which in turn generates more data that we can use to refine our algorithms.